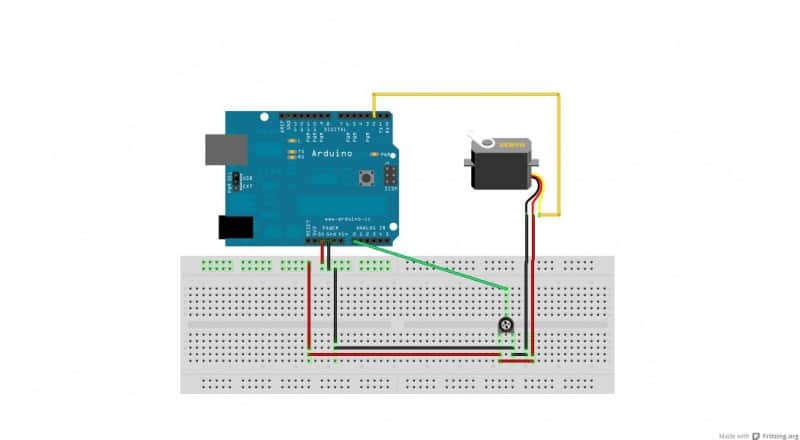
En este tutorial vamos a aprender a controlar un servomotor gracias a Arduino y a su pequeño firmware que podes ver en esta página. El esquema del circuito lo podéis ver a continuación.

Un servomotor es un dispositivo mecánico formado por un motor de corriente continua y un conjunto de dispositivos electrónicos que permiten saber en que posición se encuentra el eje de giro. De esta forma podemos colocar el rotor del motor en una posición determinada con respecto al punto cero de giro.
Para controlar el motor usaremos Arduino, el cual emitirá una señal PWM (Pulse Width Modulation).
Código
//Inicializamos la libreria
#include
//Declaramos las variables y el servomotor
Servo miservo;
int lectura;
int angulo;
void setup () {
miservo.attach(3); //Especificamos en que puerto este el servo
}
void loop () {
int lectura = analogRead(0); //Leemos el potenciometro y guardamos la lectura
int angulo = map (lectura, 0, 1023, 0, 179); //Hacemos una regla de tres para convertir el valor analóqico en un ángulo
miservo.write(angulo); //Mandamos el ángulo al servomotor
delay (50); //Creamos un delay para que Arduino no se sature.
}
Esquema